Graphical representation of the structure combined with some trajectory
superskeleton.RdWith this function, you can represent either a singleton (one joint), a couple (the difference between two joints), a triplet (the angle between two vectors generated by the three joints). You can as well represent two singletons, two couples and two triplets.
superskeleton(
joint,
structure,
sidekick,
num.joint,
num.frame,
num.x,
num.y,
frame.index = NULL,
body.part,
color.part,
plot.title,
x.legend,
y.legend,
x.dilatation = 1,
y.dilatation = 1,
x.translation = 200,
y.translation = 0,
fps = 30
)Arguments
| joint | The joint dataset: the coordinates of the joints as a function of time |
|---|---|
| structure | The structure dataset: a first column with the segments composing the structure, two other columns defining the extremities of the segments |
| sidekick | A dataset formatted to be plotted with the superskeleton function, the sidekick information |
| num.joint | The index of the column associated with the joint variable |
| num.frame | The index of the column associated with the frame variable |
| num.x | The index of the column associated with the x-axis variable represented on the graphical output |
| num.y | The index of the column associated with the y-axis variable represented on the graphical output |
| frame.index | The index of the frame you want to represent (static representation) |
| body.part | The names of the segments you want to represent |
| color.part | The colour you want to use to represent the segments |
| plot.title | The title of the graphical output |
| x.legend | The legend on the x-axis |
| y.legend | The legend on the y-axis |
| x.dilatation | The dilatation coefficient on the x-axis |
| y.dilatation | The dilatation coefficient on the y-axis |
| x.translation | The translation coefficient on the x-axis |
| y.translation | The translation coefficient on the y-axis |
| fps | The number of frames per second |
Value
An animation by default or a static representation for a given frame
Examples
if (FALSE) {
data(gaetan_apchagi)
data(human)
S1_right_ankle <- sidekick(joint=gaetan_apchagi, num.joint=2, num.name=8,
num.x=6, num.y=4, joint1="RIGHT_ANKLE", joint2=NULL)
superskeleton(joint=gaetan_apchagi, structure=human, sidekick=S1_right_ankle,
num.joint=2, num.frame=6, num.x=3, num.y=4, frame.index=NULL,
body.part="RIGHT_ANKLE", color.part="orange",
plot.title="Gaetan - right ankle trajectory", x.legend="Frame",
y.legend="Trajectory in y (cm)")
}
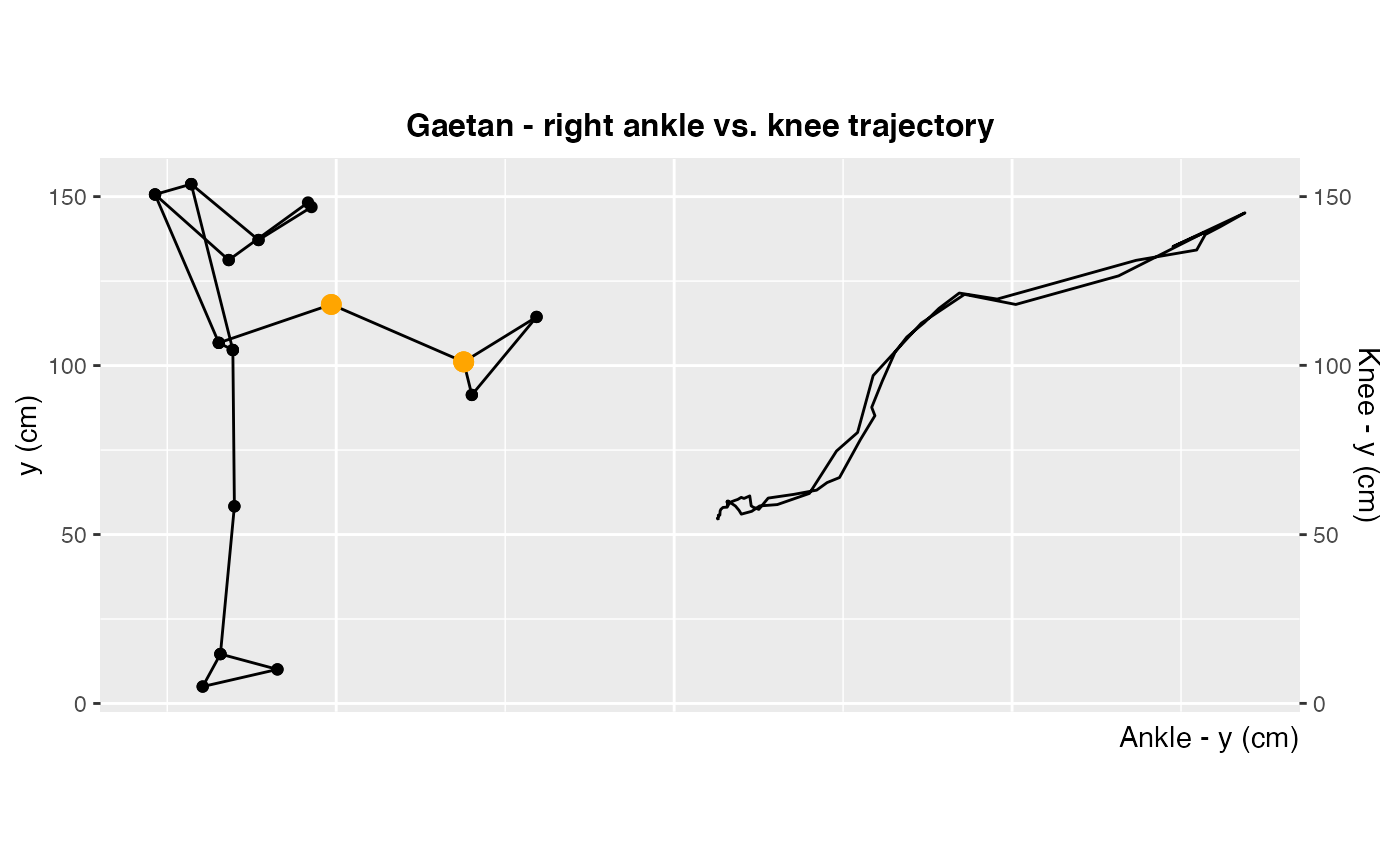
data(gaetan_apchagi)
data(human)
S2_right_ankle_knee <- sidekick(joint=gaetan_apchagi, num.joint=2, num.name=8,
num.x=4, num.y=4, joint1="RIGHT_ANKLE", joint2="RIGHT_KNEE")
superskeleton(joint=gaetan_apchagi, structure=human, sidekick=S2_right_ankle_knee,
num.joint=2, num.frame=6, num.x=3, num.y=4,
frame.index=25, body.part=c("RIGHT_ANKLE","RIGHT_KNEE"),
color.part="orange",
plot.title="Gaetan - right ankle vs. knee trajectory", x.legend="Ankle - y (cm)",
y.legend="Knee - y (cm)")